로봇,ROS,SLAM
Issac Sim 설치 and ROS URDF 불러오기
- -
https://www.nvidia.com/ko-kr/omniverse/
개발 시작하기 버튼 누르기
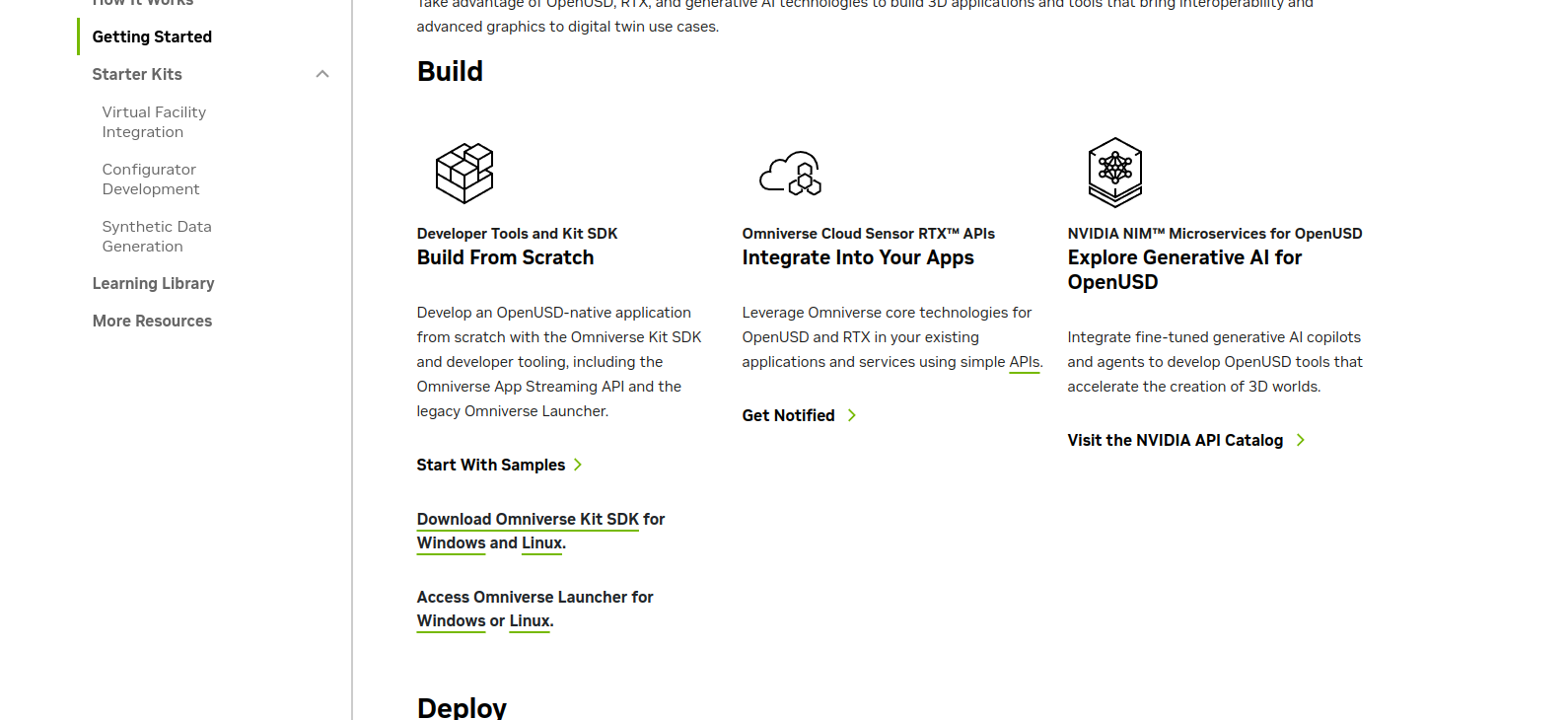
여기서 헷갈리는데 아래 Omniverse Launcher를 다운받아야한다. 아래 Linux를 클릭하면 AppImage 파일이 다운된다.
아래 링크는 launcher 설치 가이드 문서이다.
https://docs.omniverse.nvidia.com/launcher/latest/it-managed-launcher/install_guide_linux.html
Installation on Linux — Omniverse Launcher
To install the IT Managed Launcher on Linux (Ubuntu 20.04 and 22.04), follow these steps: Run the IT Managed Launcher by launching the AppImage you downloaded from the Licensing Portal locally on users workstations. Important On Linux, instead of running t
docs.omniverse.nvidia.com
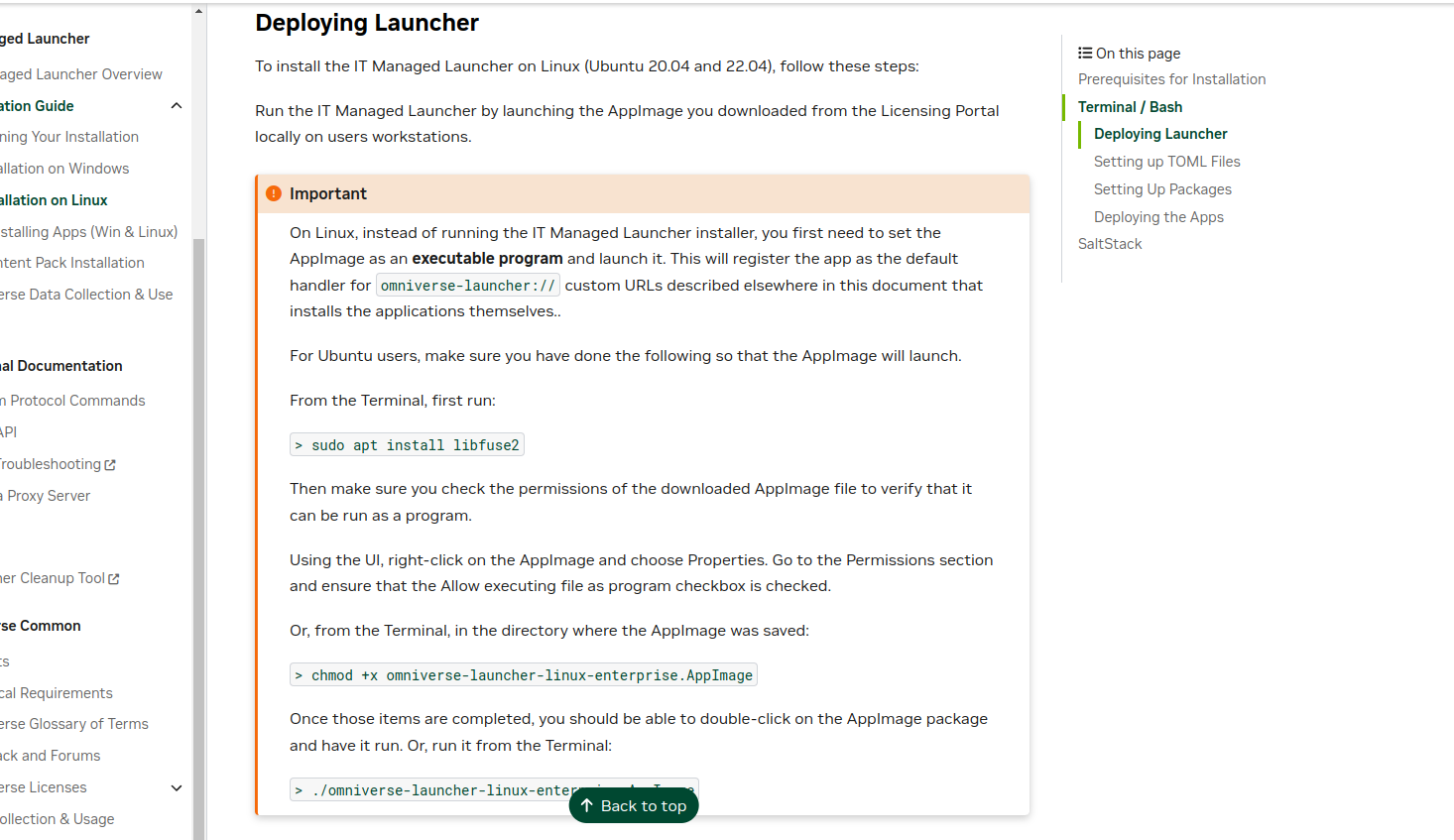
우리는 해당 문서를 따른다.
먼저 아래 명령어를 수행한다.
sudo apt install libfuse2다음으로 다운로드 폴더에 가본다.
해당 앱을 우클릭-> 속성-> 권한 탭에 들어간다. 아래와 같이 체크해준다.
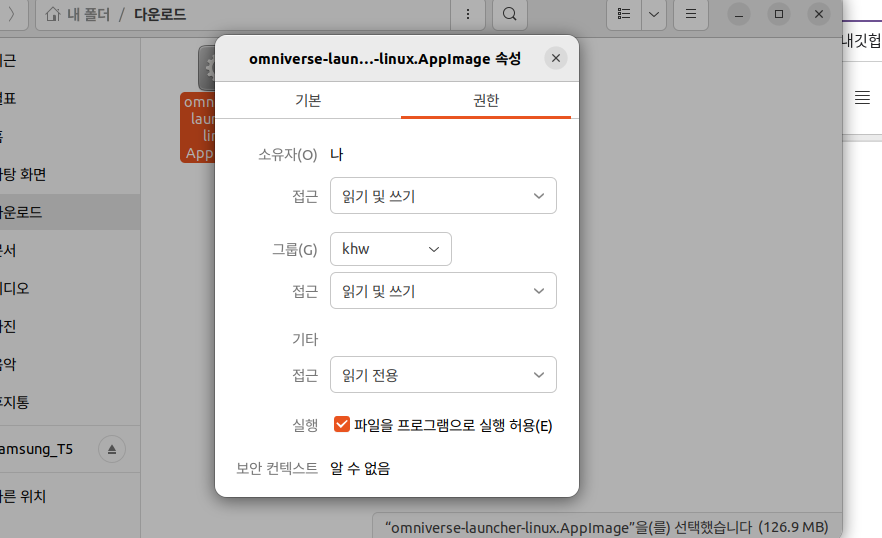
이제 앱을 더블클릭해 실행한다.

언어 바꿔주고 로그인 하고 계속하기 하면
휴.. 드디어 됐다.

거래소 -> ISAAC SIM -> 설치
설치 이후 Lauching

위와 같이 ROS Bridge Extension을 선택하고
Use Internal ROS2 Libraries를 선택한다.
START를 눌러준다.

휴.. 겨우 됐다.
이제 우리는 로봇 개를 불러올것이다.
https://www.youtube.com/watch?v=L1rpxRm0Q1w&t=464s
로봇개 URDF 파일을 다운받아 준다.
https://drive.google.com/drive/folders/1fdtBgbXUCxln3wdQgWUAGIBdBf-2Qv9z
그리고 나는 home/ROS2 위치에 해당 URDF 파일을 옮겨두었다.

해당 폴더에 들어가서 터미널을 열어주고 아래 명령어를 실행한다. 아나콘다 가상환경에서 하지 말것
colcon build

만약 오류가 발생하면

pip install catkin_pkg
source /opt/ros/humble/setup.bash
export PATH=/usr/bin:$PATH
몇개의 폴더들이 더 생겼다.
우리는 install 폴더의 setup.bash를 실행시켜줘야한다.
새 터미널 창을 열어주고 아래 명령어를 실행한다.
source ~/ROS2/quadruped_robot_ROS2/install/setup.bash
cd ~/ROS2/quadruped_robot_ROS2/src/robot_simulation/robot_description/robot/
xacro robot.xacro > robot.urdf
그럼 우리는 urdf 파일을 얻었다.
다시 시뮬레이터로 돌아가서
Issac Utils > Workflows > URDF Importer
Fix Base Link 체크 풀기 (우리의 모델이 고정되어 있지 않기 때문에)

더 내리면 마지막에 Input 섹션이 있다.
robot.urdf 파일을 선택해준다.
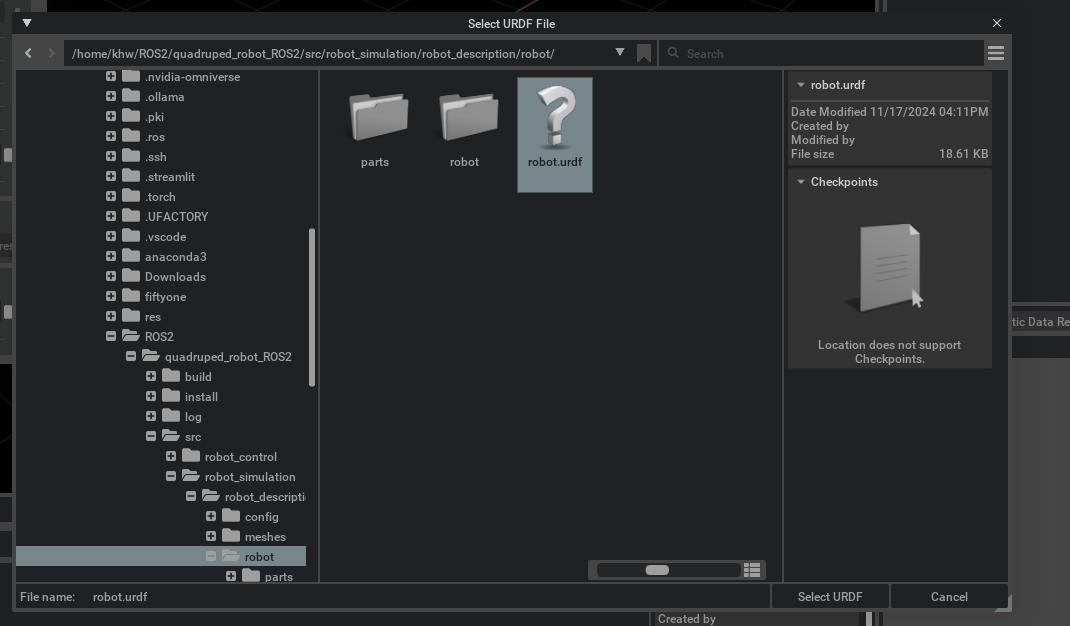
Select URDF를 해준다
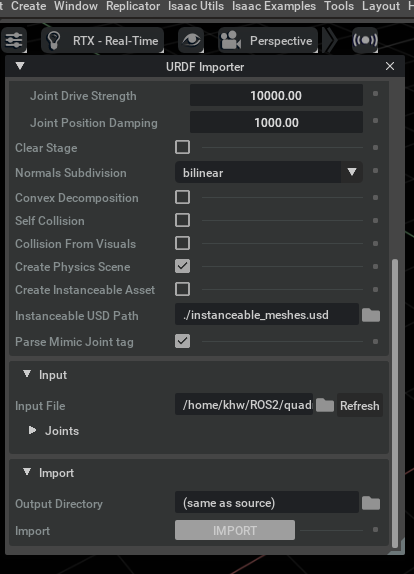
마지막으로 IMPORT 버튼을 눌러주어야 한다.
Yes 두번

로봇개 두두등장

Create > Physics > Ground Plane
마우스로 이리 저리 움직여 보자
왼쪽에 Play 버튼이 있다.
Issac Utils > Common Omnigraphs > Articulation Position Controller

Add 버튼을 누른다.

Select 버튼 > Okay 버튼
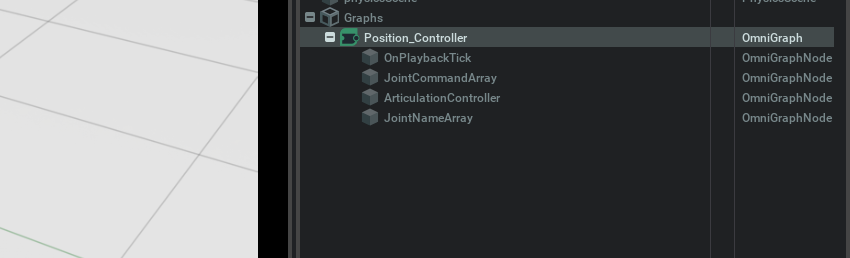
우측에 Graphs > Position_Controller
Position_Controller 에 우클릭 > Open Graph 선택
아래 그래프가 보임
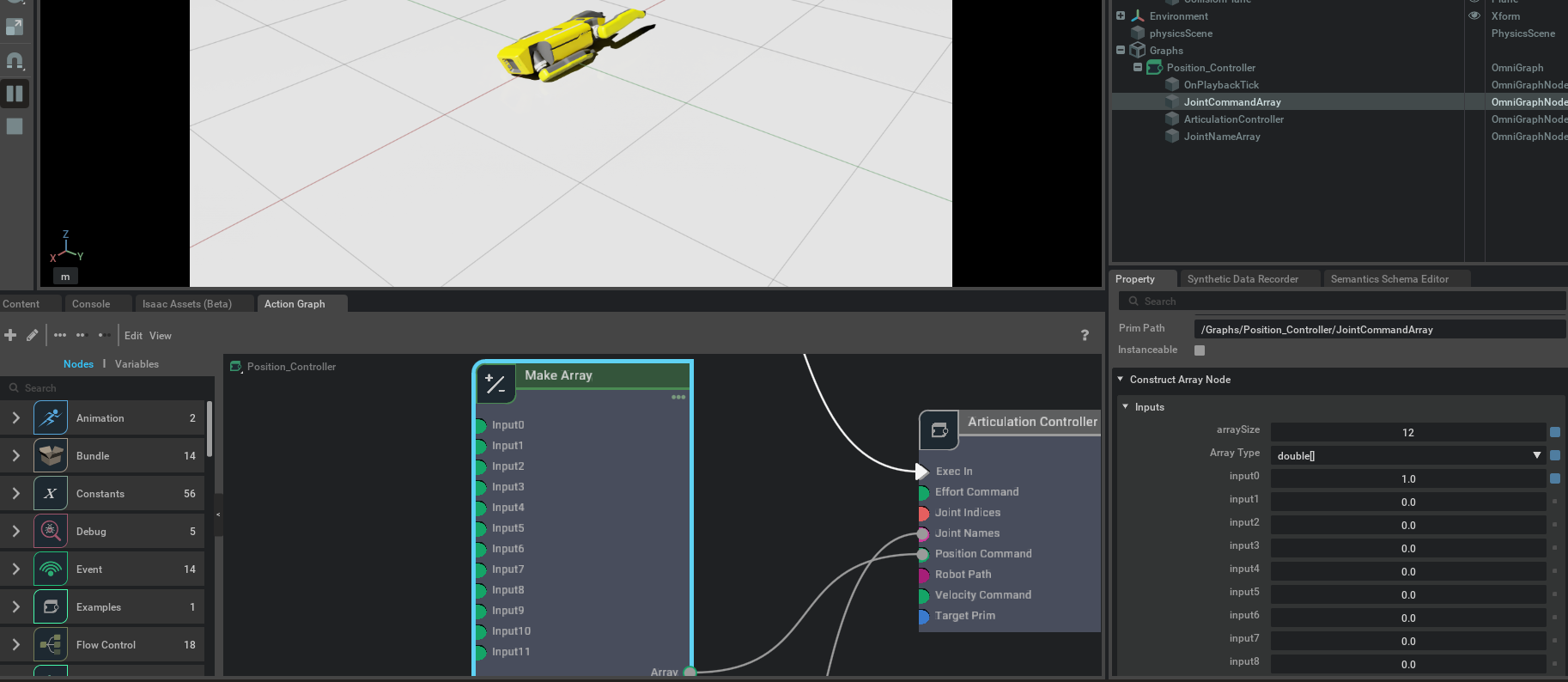
Main Array에서 input 1의 값을 0에서 1로 바꿔보고 Play를 해보자.
'로봇,ROS,SLAM' 카테고리의 다른 글
| [Genesis Part1] Genesis 알아보고 Ubuntu에서 구동해보기 (0) | 2025.01.01 |
|---|---|
| OpenVLA Tutorial 3 (0) | 2024.11.23 |
| OpenVLA Tutorial 2 (1) | 2024.11.19 |
| OpenVLA Tutorial 01 (1) | 2024.11.19 |
| [ROS2] ROS2 Humble 설치 및 alias로 bashrc 설정 (0) | 2024.11.17 |
Contents
소중한 공감 감사합니다