[Genesis Part2] Genesis 다양한 예제 및 튜토리얼 돌려보기 - 로봇팔
https://github.com/Genesis-Embodied-AI/Genesis
GitHub - Genesis-Embodied-AI/Genesis: A generative world for general-purpose robotics & embodied AI learning.
A generative world for general-purpose robotics & embodied AI learning. - Genesis-Embodied-AI/Genesis
github.com
Genesis 깃헙 레파지토리에 들어가서 git clone을 해준다.
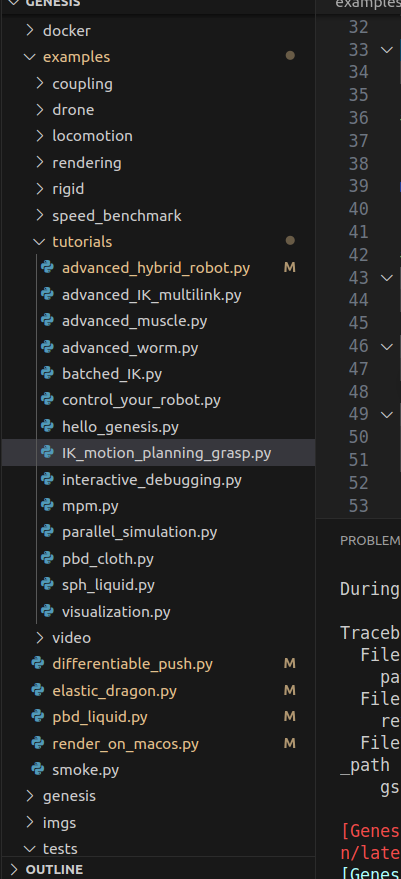
examples에 tutorials 폴더를 보면 많은 예제를 확인할 수 있다.
tutorials 폴더 밖에 differentialble_psuh.py등 예제 코드들을 보면서 실제 창작자들이 어떤 스타일로 코딩하는지 확인해 보자.
이 중에서 먼저 IK_motion_planning_grasp.py 코드를 돌려보려 한다.
근데 이 코드를 Run하면 다음과 같은 오류 메시지를 확인할 수 있다.

그렇다 OMPL을 설치해주어야 한다.
근데 OMPL이 무엇일까?
OMPL은 The Open Motion Planning Library의 약어이다.
샘플링 기반 알고리즘을 사용하여 모션 계획을 계산하기 위한 소프트웨어 패키지이다.
The Open Motion Planning Library
OMPL, the Open Motion Planning Library, consists of many state-of-the-art sampling-based motion planning algorithms. OMPL itself does not contain any code related to, e.g., collision checking or visualization. This is a deliberate design choice, so that OM
ompl.kavrakilab.org
GitHub - ompl/ompl: The Open Motion Planning Library (OMPL)
The Open Motion Planning Library (OMPL). Contribute to ompl/ompl development by creating an account on GitHub.
github.com
Genesis 가이드 페이지에 Installation을 보면 Motion planning 부분이 있다. OMPL wheel을 설치해주어야 한다.

아래 링크에 들어가자
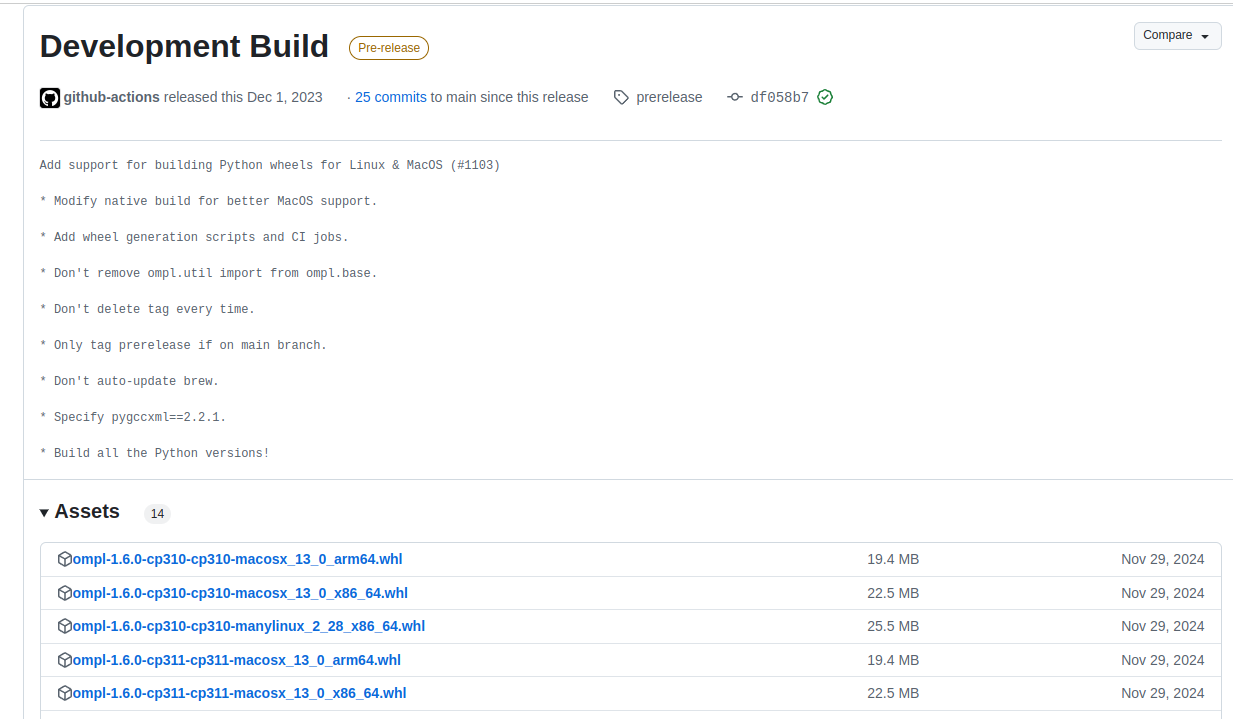
https://github.com/ompl/ompl/releases/tag/prerelease
Release Development Build · ompl/ompl
Development Build Pre-release Pre-release Add support for building Python wheels for Linux & MacOS (#1103) * Modify native build for better MacOS support. * Add wheel generation scripts and CI jobs. * Don't remove ompl.util import from ompl.base. * Don't d
github.com
현재 genesis가 설치된 아니콘다 가상환경 (나의 경우 genesis)에 activate 되어 있는 상태에서
pip install ompl-1.6.0-cp310-cp310-manylinux_2_28_x86_64.whl
해준다.
이제 다시 IK_motion_planning_grasp.py 코드를 실행시켜 본다.
